Abstract
As part of a collaborative research effort on shared control between an autonomous driving system and a human driver, I contributed to work focused on evaluating the quality of driving intentions.
A driving intention is defined as a short sequence of planned control actions (speed, steering) over a time horizon:
$$ I_t = \{(v,w)_{t+0\cdot\Delta t},(v,w)_{t+1\cdot\Delta t},...,(v,w)_{t+n\cdot\Delta t}\} \quad \text{Eq (1)} $$
For example, an intention can be expressed as a sequence of linear and angular velocities applied to the vehicle.
The evaluation challenge is twofold:
- Determine whether an intention is admissible (safe, legal, feasible)
- Evaluate its quality based on criteria such as comfort, safety margin, and compliance with road constraints
The developed framework introduces a quantification method inspired by the Bellman principle, where a future-aware score is computed using discounted weighted evaluations.
The results were published at IEEE IV 2023, GeneralPousseur 2023
Motivation
Driving intentions are often ambiguous. For the same situation, multiple trajectories may exist:
- One that crashes (inadmissible)
- One that narrowly avoids an obstacle (admissible but low quality)
- One that handles the scene smoothly (admissible and high quality)
Unified Evaluation Pipeline
Each driving intention is evaluated over time and across multiple criteria using a unified scoring formulation that distinguishes between:
- Admissibility: binary decision from hard constraints (guards)
- Quality: scalar score using weighted and discounted evaluators
Quality Evaluation (Soft Criteria)
Quality represents the evaluation of intentions based on several criteria, such as comfort and security. Each criterion is defined by two functions: a metric that quantifies the situation and an analyzer that evaluates the result.
Metric per Evaluator
For each soft evaluator $k$ and time step $t$, a metric is computed:
$$ m_k(t) = f_k(x_t, u_t, \text{context}) \quad \text{Eq (2)} $$
Where:
- $x_t$: system state at time $t$ (e.g. position, velocity)
- $u_t$: control command at time $t$ (e.g. acceleration, steering)
context: environment description (obstacles, road structure)- $f_k$: metric function for evaluator $k$ (e.g. lateral acceleration, speed violation)
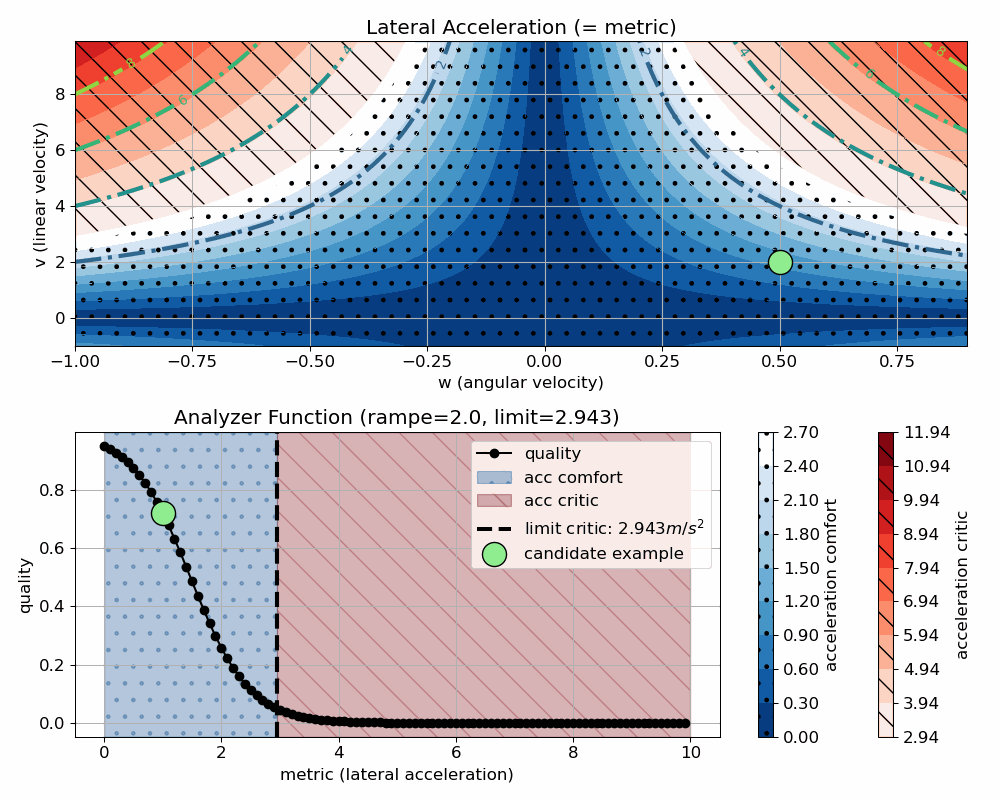
Analyzer Function (Generic Form)
Each metric is transformed into a normalized score using a dedicated analyzer function:
$$ q_k(t) = \mathcal{A}_k(m_k(t)) \in [0, 1] \quad \text{Eq (3)} $$
Where:
- $\mathcal{A}_k$: a mapping that interprets the metric’s value for comfort, safety, or feasibility.
Example (sigmoid-shaped analyzer):
$$ \mathcal{A}_k(m) = \frac{1}{1 + e^{\text{ramp}_k \cdot (m - \text{shift}_k)}} \quad \text{Eq (4)} $$
ramp_k: controls the steepness of the score dropshift_k: defines the acceptable threshold
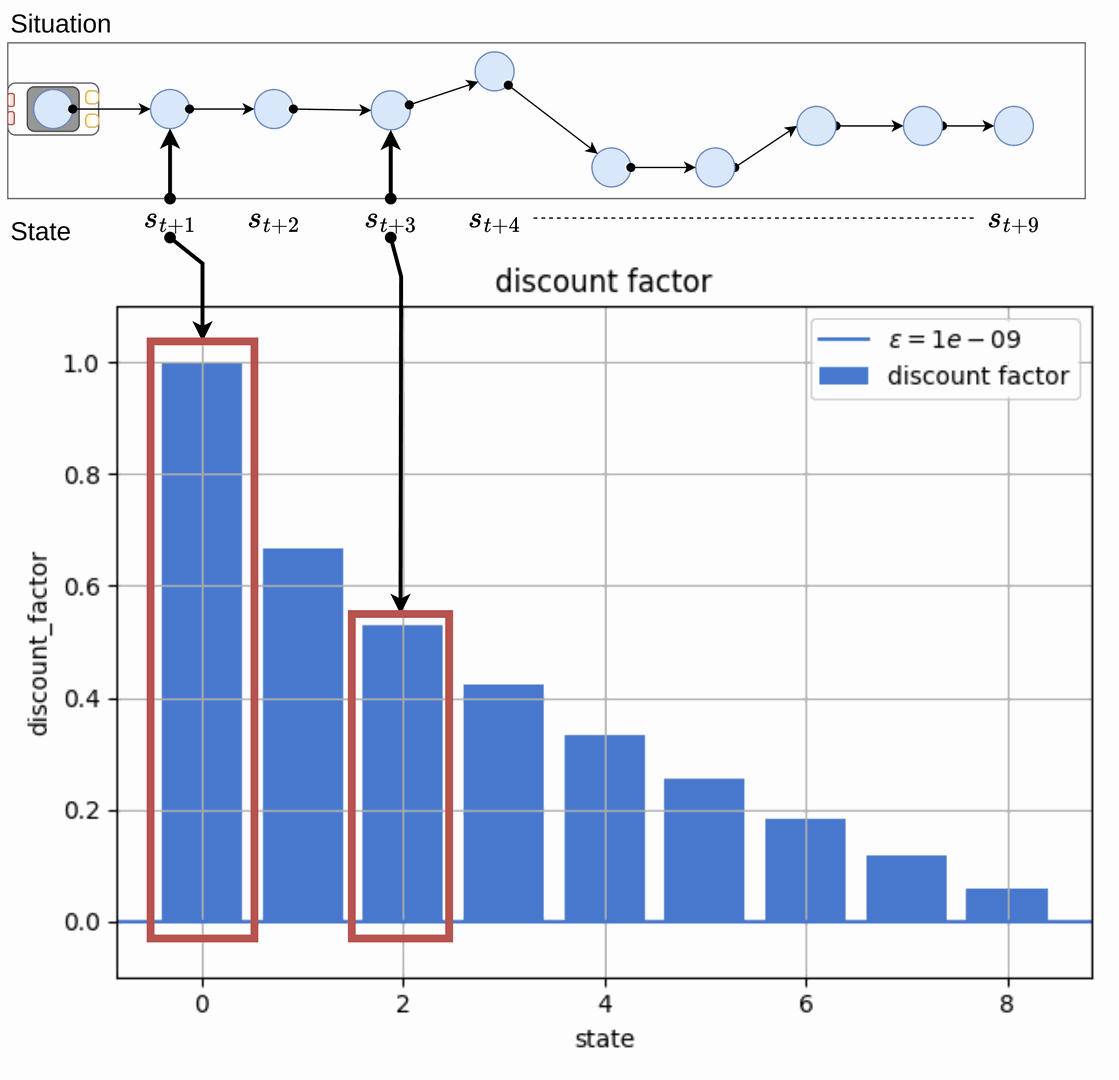
Temporal Discounting
To give more weight to early decisions (e.g. avoid imminent risks), exponential discounting is applied:
$$ Q_k = \sum_{t=0}^T \gamma^t \cdot q_k(t) \quad \text{Eq (5)} $$
Where:
- $Q_k$: total discounted score for evaluator $k$
- $q_k(t)$: score at time $t$ for evaluator $k$
- $\gamma$: discount factor $(\gamma \in [0, 1])$
- $T$: prediction horizon
Aggregation of Soft Scores
After computing all evaluator scores $Q_k$, the final global score is:
$$ Q_{\text{final}} = \sum_{k=1}^K w_k \cdot Q_k \quad \text{Eq (6)} $$
Where:
- $w_k$: weight of importance for criterion $k$
- $Q_k$: quality score for criterion $k$
Only admissible intentions are compared using this fusion.
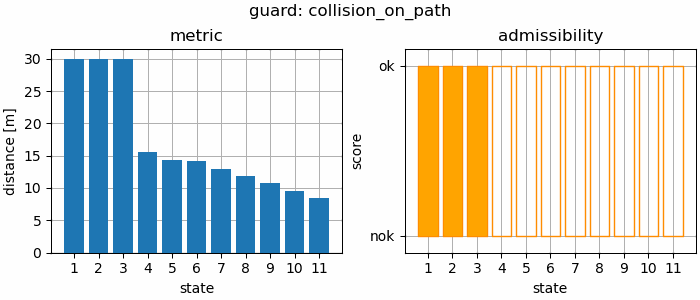
Admissibility Evaluation (Hard Constraints)
Unlike soft evaluators, admissibility is a binary outcome: either the intention is valid or not. It is determined by a set of guard functions.
Each guard combines:
- a metric function $m_j(t)$
- a boolean test $\mathcal{G}_j$ over that metric
Generic formulation for one guard:
$$ g_j(t) = \mathcal{G}_j(m_j(t)) \in \{0, 1\} \quad \text{Eq (7)} $$
Final admissibility decision:
$$ \text{Admissible} = \prod_j \left( \bigwedge_{t=0}^{T} g_j(t) \right) \quad \text{Eq (8)} $$
Meaning:
- An intention is admissible only if all guards are satisfied at all time steps.
- If any guard fails, the intention is immediately rejected.
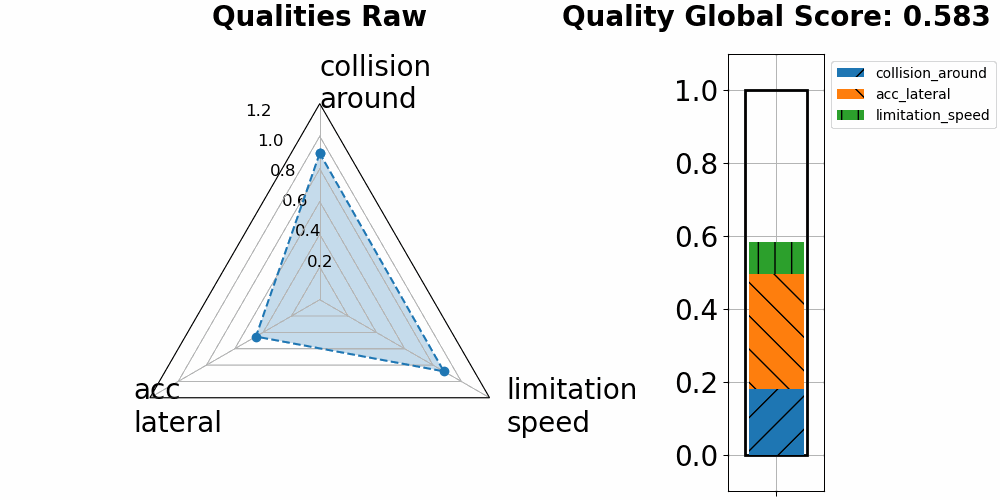
Visualization of Evaluators
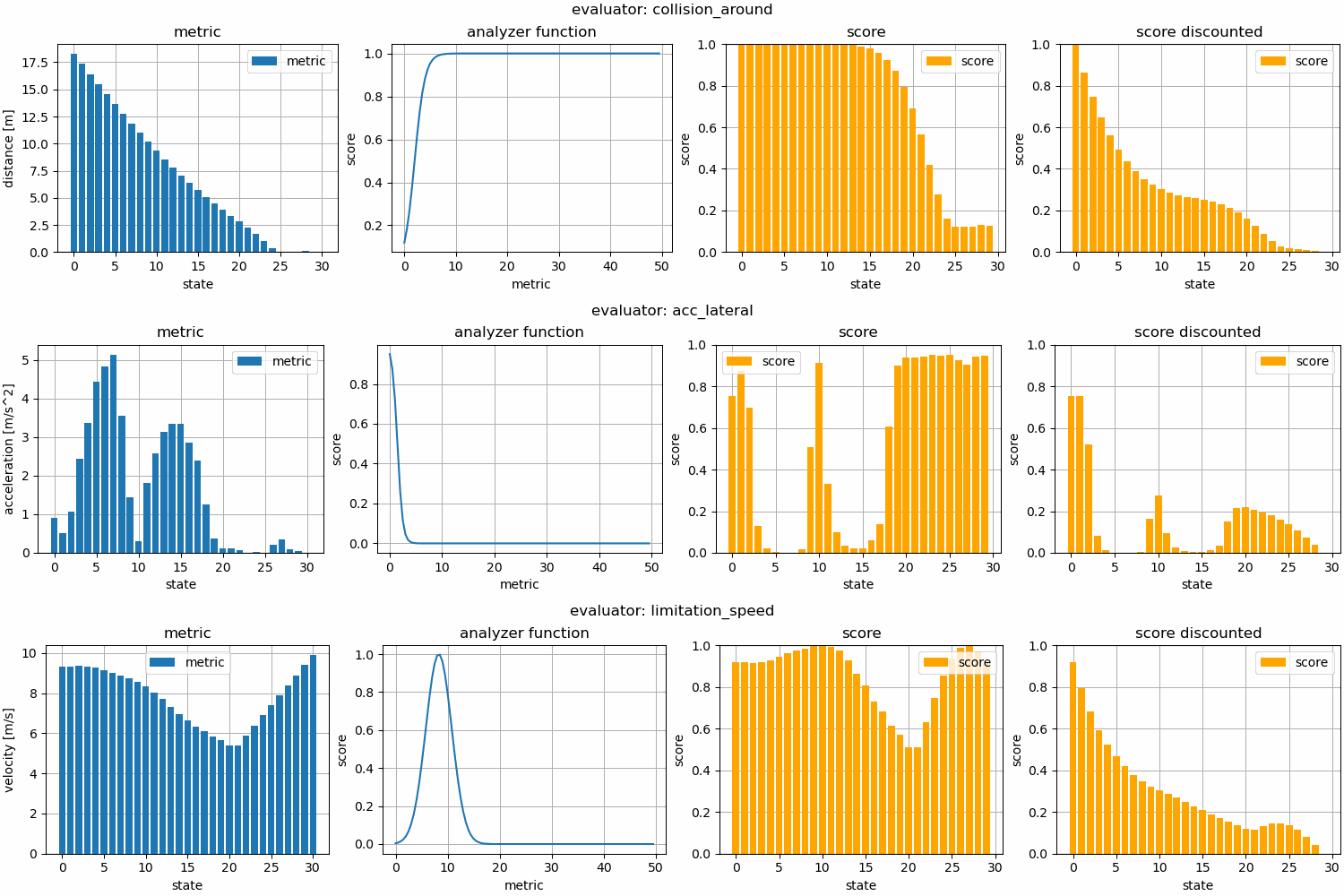
This example comes from a scenario where the vehicle avoids a front obstacle with aggressive lateral acceleration. It illustrates how each step of the evaluation pipeline contributes to the global quality score.
Trajectory Comparison
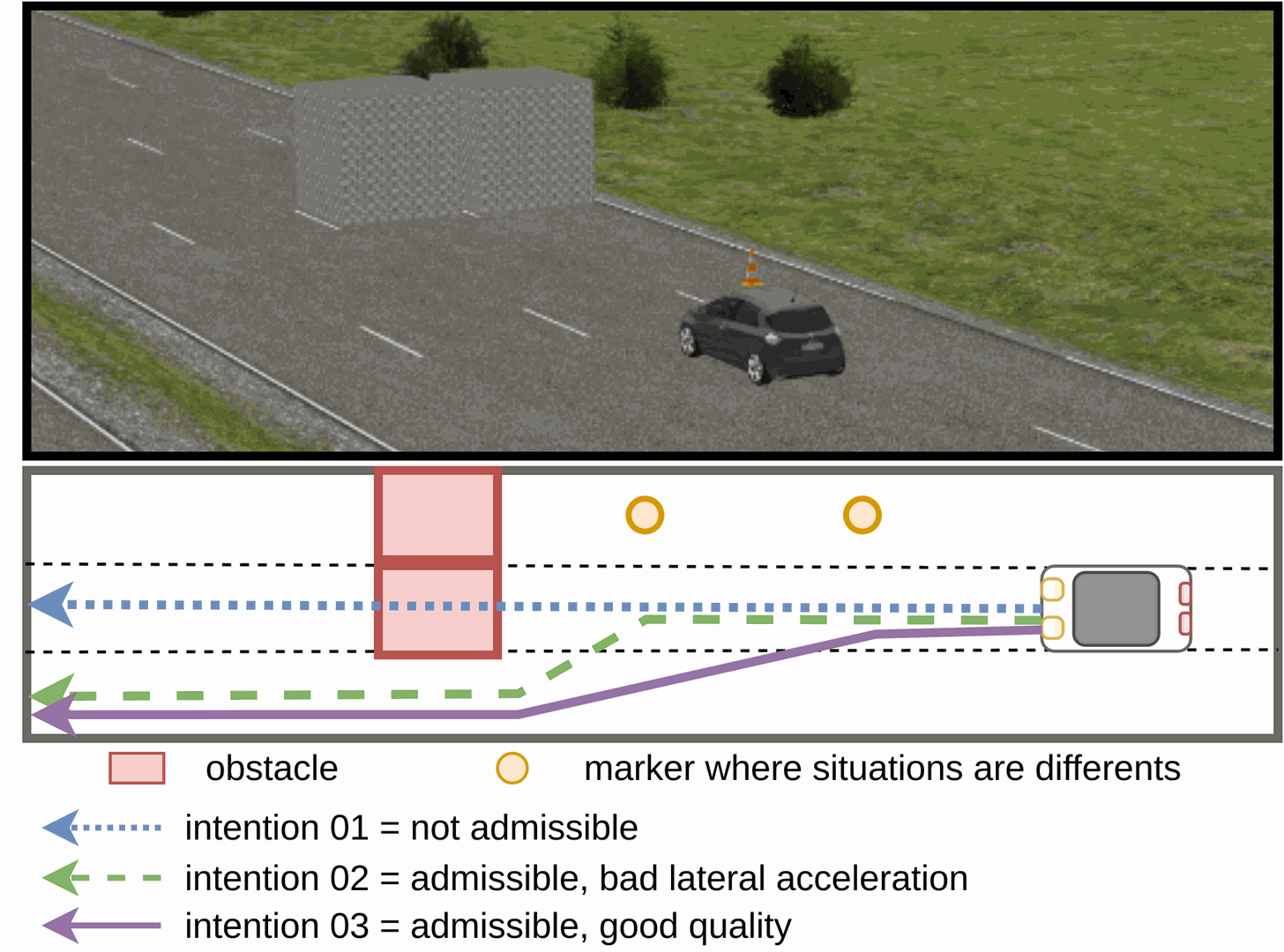
The quantification framework has been exploited to evaluate multiple driving intentions for the same scenario. The example below considers a situation where the vehicle must navigate around a static obstacle ahead.
Environment Overview
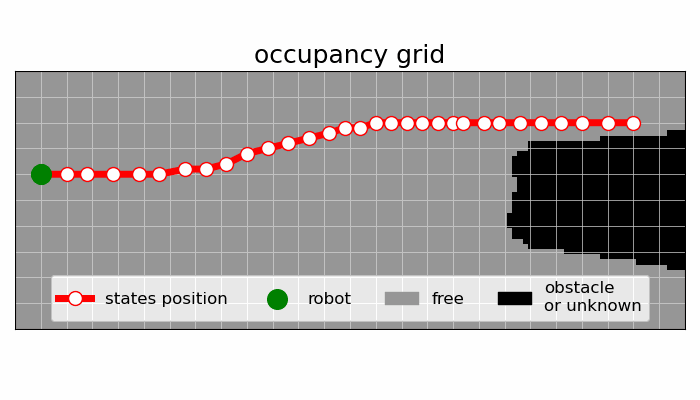
- Set A: Executes a fast lateral deviation to avoid the obstacle, maintaining admissibility but causing strong accelerations.
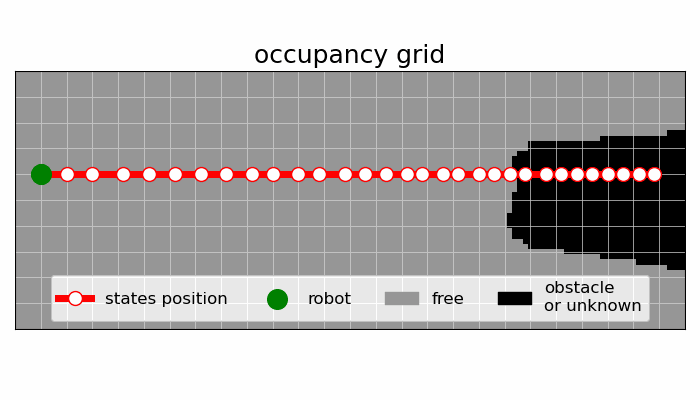
- Set B: Continues straight and collides with the obstacle; inadmissible.
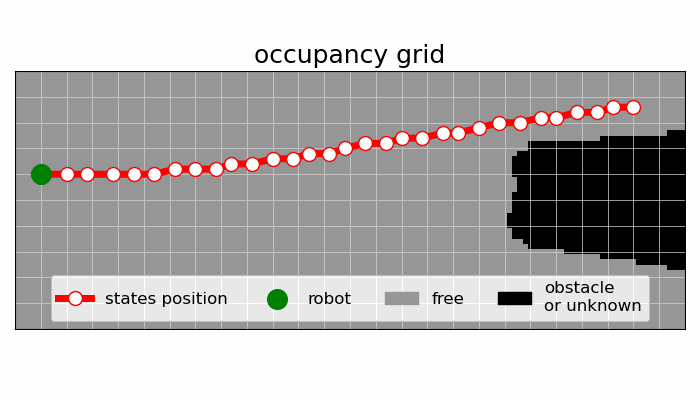
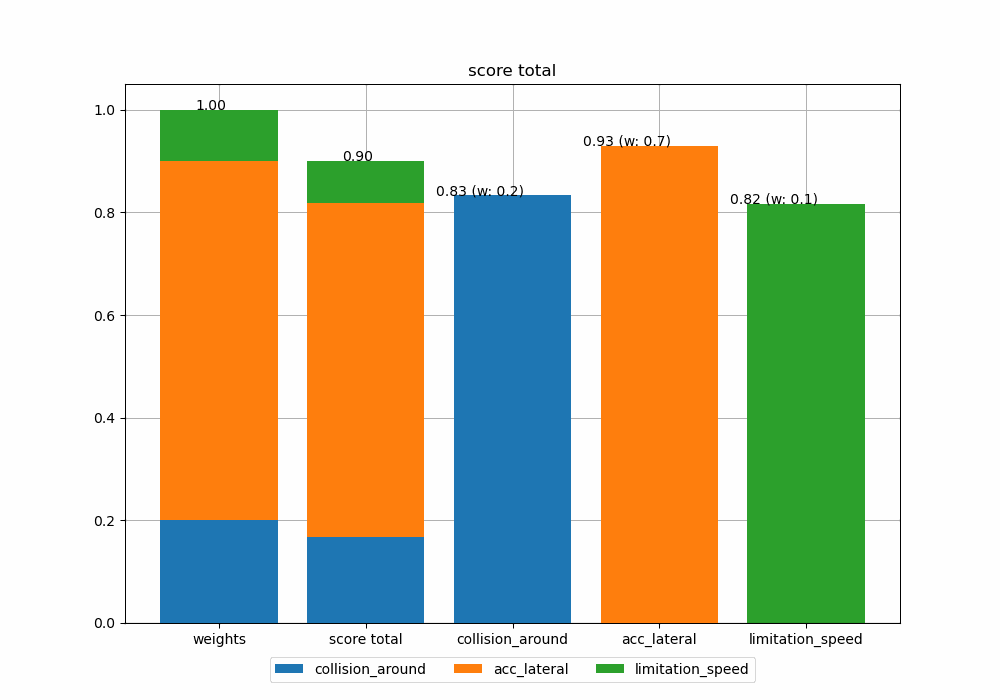
- Set C: Anticipates early, gently deviating from the obstacle with minimal dynamic effort.
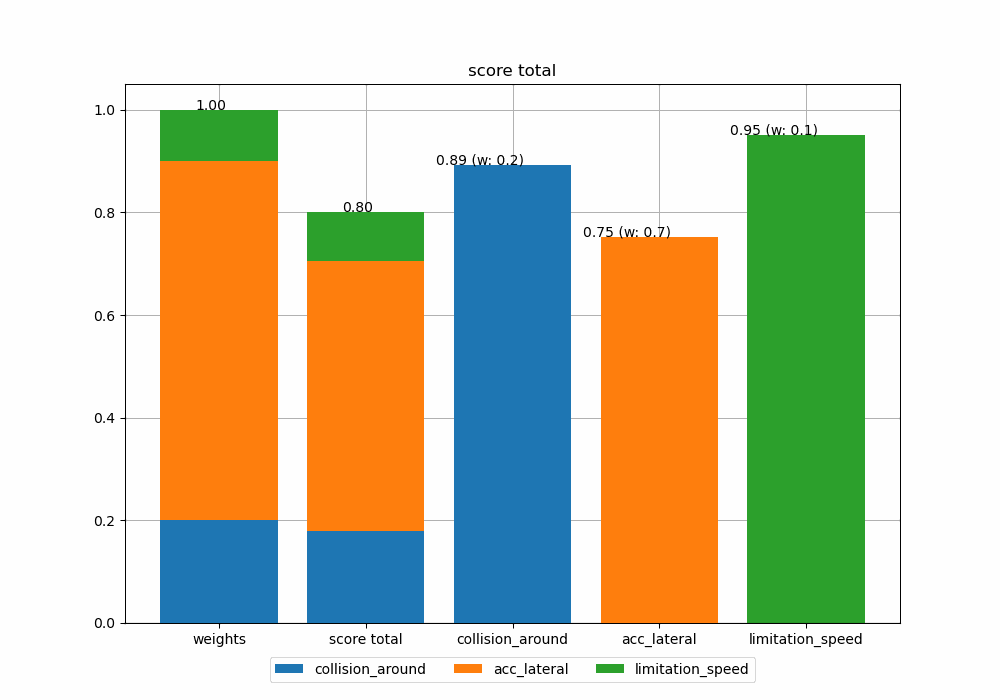
Per-Evaluator Score Analysis
Each trajectory is scored across three soft evaluators:
- Lateral acceleration (comfort)
- Speed compliance (respect for speed limits)
- Other contextual metrics (excluding collision itself)
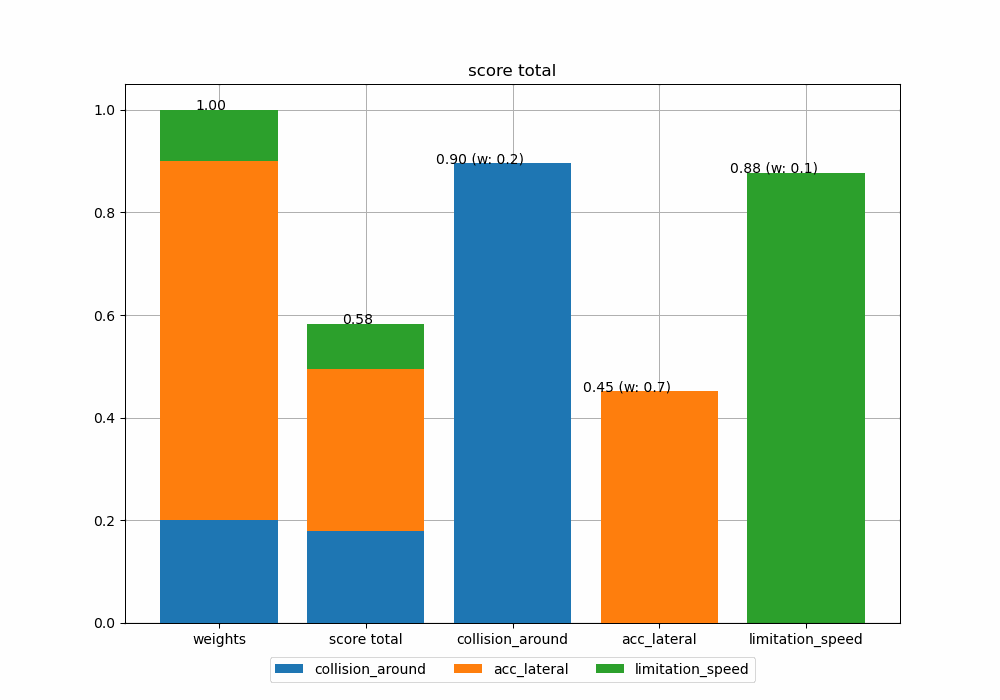
- Set A: Good obstacle clearance, but high lateral acceleration yields mixed scores.
- Set B: High comfort and speed compliance metrics, but rejected due to collision guard failure.
- Set C: High scores on all criteria, indicating smooth and legal behavior.
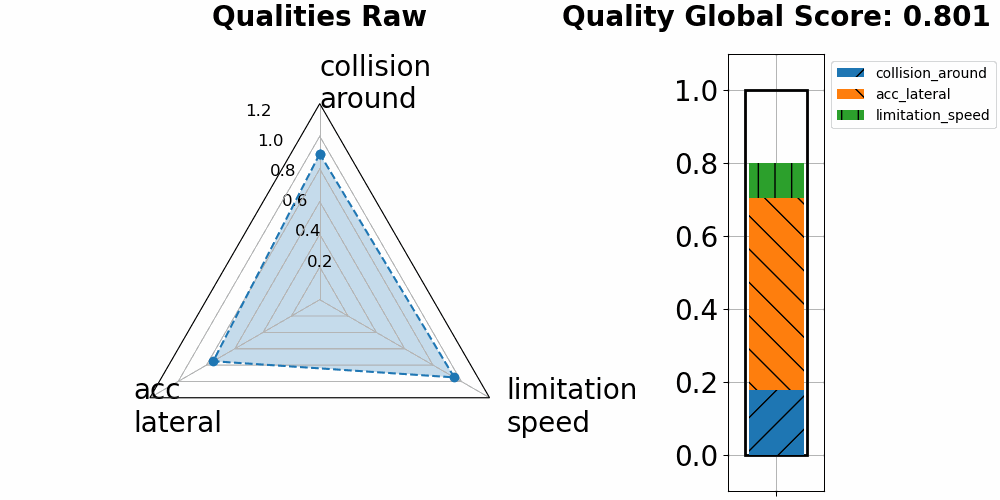
Final Aggregated Score
Per-evaluator scores are combined using weighted summation into a final quality score, applied only to admissible trajectories:
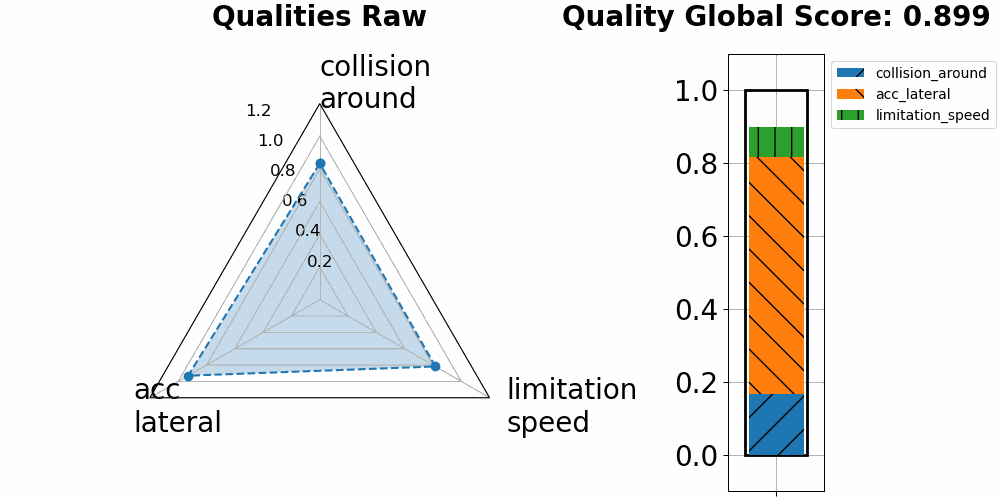
- Set A: Moderate total score; admissible but dynamically aggressive.
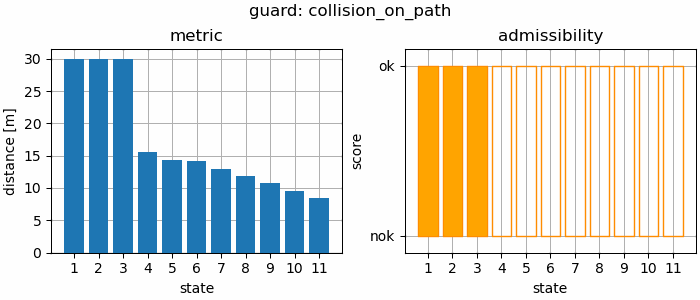
- Set B: Rejected due to collision guard violation.
- Set C: Highest final score; safe, smooth, and legal trajectory.
Guard Evaluation
Each intention is checked against guard functions:
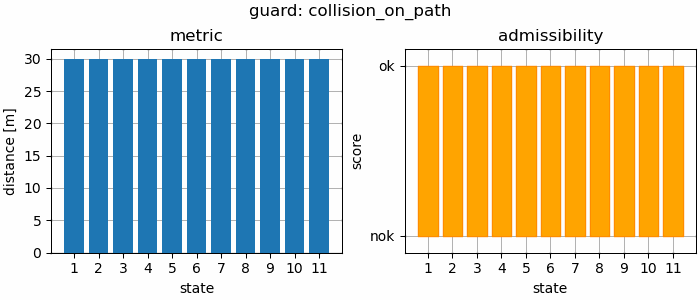
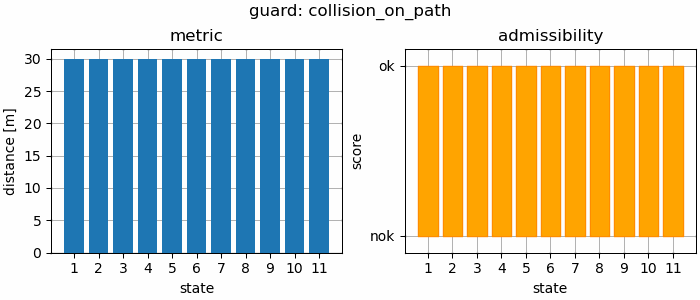
- Set A and Set C: All guards satisfied.
- Set B: Collision guard failed; trajectory rejected.
Summary Table
| Set | Admissible | Lateral Accel Score | Speed Score | Final Score | Comments |
|---|---|---|---|---|---|
| A | YES | Low | Medium | Medium | Avoids obstacle but sharp turn |
| B | NO | High | High | 0 | Smooth, but collision → rejected |
| C | YES | High | High | High | Smooth, safe, fully admissible |
Conclusion
This quantification method provides a structured and scalable way to assess driving intentions:
- Guard-based admissibility ensures feasibility and safety
- Soft metric scoring evaluates comfort and driving style
- Temporal discounting values proactive behavior
- Fusion weighting allows fine control over decision logic
Applications include:
- Shared autonomy decision fusion
- Risk-sensitive motion planning
- Real-time arbitration between competing strategies
References
- General and Multi-Criteria Approach to Study the Admissibility and Quality of a Driving Intention
Hugo Pousseur, Alessandro Correa Victorino
IEEE IV 2023
[Access PDF]